矩阵
矩阵的意义
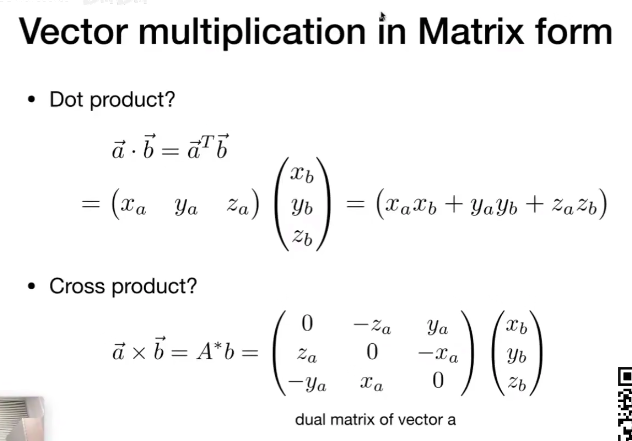
矩阵之间的计算
转置矩阵,把矩阵沿着对角线翻转一下,由于常用的是方针矩阵,所有转置后,还是相同的大小,只是将对角线两侧的数字进行对调
齐次矩阵
将一个原先是n维的矩阵用一个n+1维的矩阵表示
齐次坐标描述的是缩放不变性
矩阵可以表达空间的缩放、旋转、切边,但无法表达偏移,因此,我们增加一个维度的矩阵来表达当下维度的偏移,即齐次矩阵
旋转
旋转矩阵的推导
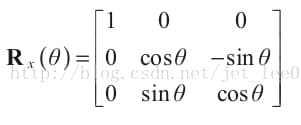
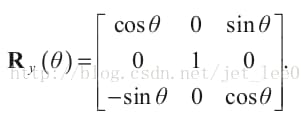
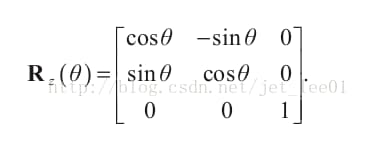
旋转矩阵
绕着X轴旋转的矩阵
绕着Y轴旋转的矩阵
绕着Z轴旋转的矩阵
绕着任意轴旋转的矩阵

C : cosθ
S : sinθ
Game101
投影
link
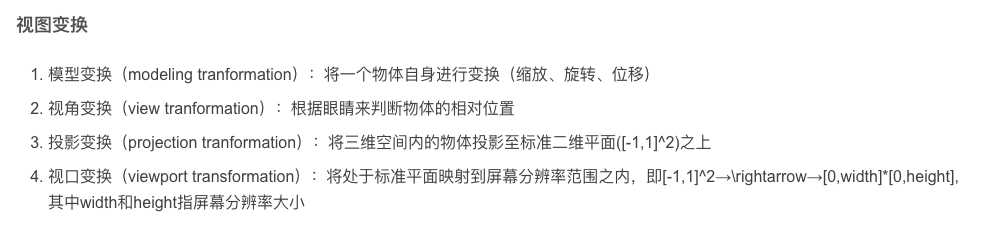
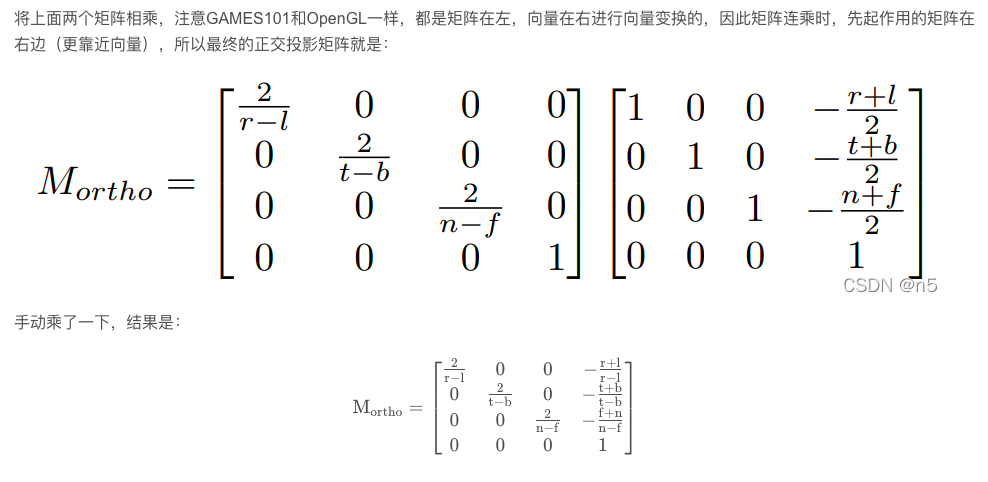
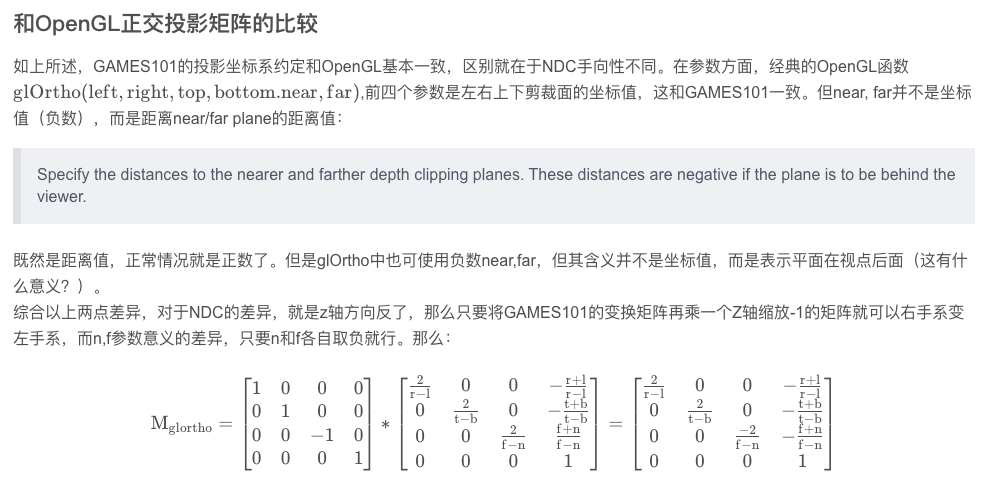
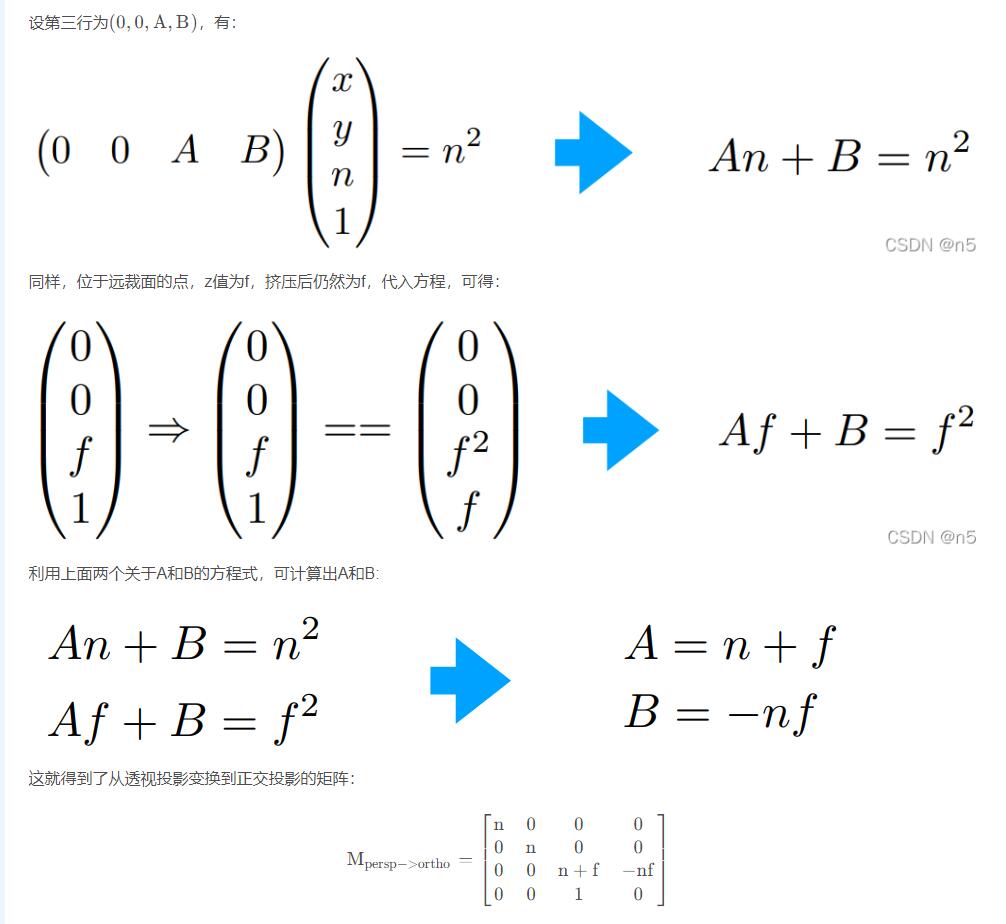
从透视投影变换到正交投影的矩阵
运算
乘法
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
| Vector3 operator*(const Vector3& v) const
{
Vector3 r;
float inv_w = 1.0f / (m_mat[3][0] * v.x + m_mat[3][1] * v.y + m_mat[3][2] * v.z + m_mat[3][3]);
r.x = (m_mat[0][0] * v.x + m_mat[0][1] * v.y + m_mat[0][2] * v.z + m_mat[0][3]) * inv_w;
r.y = (m_mat[1][0] * v.x + m_mat[1][1] * v.y + m_mat[1][2] * v.z + m_mat[1][3]) * inv_w;
r.z = (m_mat[2][0] * v.x + m_mat[2][1] * v.y + m_mat[2][2] * v.z + m_mat[2][3]) * inv_w;
return r;
}
Vector4 operator*(const Vector4& v) const
{
return Vector4(m_mat[0][0] * v.x + m_mat[0][1] * v.y + m_mat[0][2] * v.z + m_mat[0][3] * v.w,
m_mat[1][0] * v.x + m_mat[1][1] * v.y + m_mat[1][2] * v.z + m_mat[1][3] * v.w,
m_mat[2][0] * v.x + m_mat[2][1] * v.y + m_mat[2][2] * v.z + m_mat[2][3] * v.w,
m_mat[3][0] * v.x + m_mat[3][1] * v.y + m_mat[3][2] * v.z + m_mat[3][3] * v.w);
}
|
构建
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
| void Matrix4x4::makeTransform(const Vector3& position, const Vector3& scale, const Quaternion& orientation)
{
Matrix3x3 rot3x3;
orientation.toRotationMatrix(rot3x3);
m_mat[0][0] = scale.x * rot3x3[0][0];
m_mat[0][1] = scale.y * rot3x3[0][1];
m_mat[0][2] = scale.z * rot3x3[0][2];
m_mat[0][3] = position.x;
m_mat[1][0] = scale.x * rot3x3[1][0];
m_mat[1][1] = scale.y * rot3x3[1][1];
m_mat[1][2] = scale.z * rot3x3[1][2];
m_mat[1][3] = position.y;
m_mat[2][0] = scale.x * rot3x3[2][0];
m_mat[2][1] = scale.y * rot3x3[2][1];
m_mat[2][2] = scale.z * rot3x3[2][2];
m_mat[2][3] = position.z;
m_mat[3][0] = 0;
m_mat[3][1] = 0;
m_mat[3][2] = 0;
m_mat[3][3] = 1;
}
|
向量坐标转换
齐次坐标处理
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
| Vector3 transformCoord(const Vector3& v)
{
Vector4 temp(v, 1.0f);
Vector4 ret = (*this) * temp;
if (ret.w == 0.0f)
{
return Vector3::ZERO;
}
else
{
ret /= ret.w;
return Vector3(ret.x, ret.y, ret.z);
}
return Vector3::ZERO;
}
|
