向量 向量的意义 通常用于表示坐标数据,距离,速度,位移,加速度
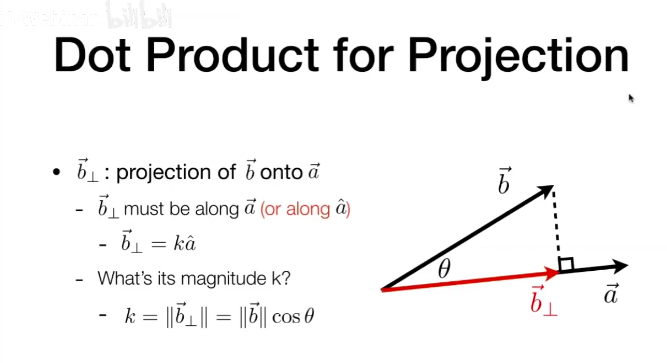
点乘 得到两向量之间的夹角
1 2 3 float dotProduct (const Vector3& vecconst return x * vec.x + y * vec.y + z * vec.z; }
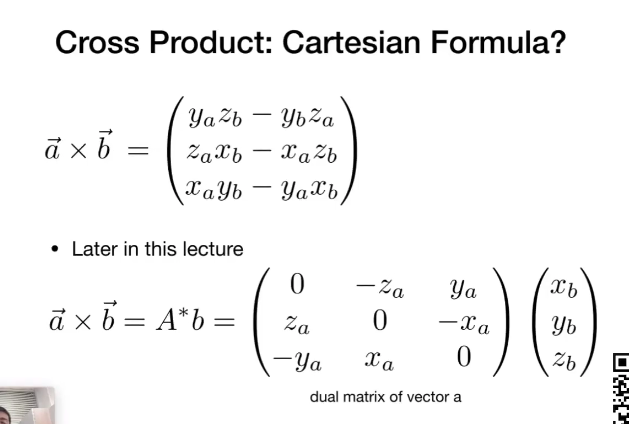
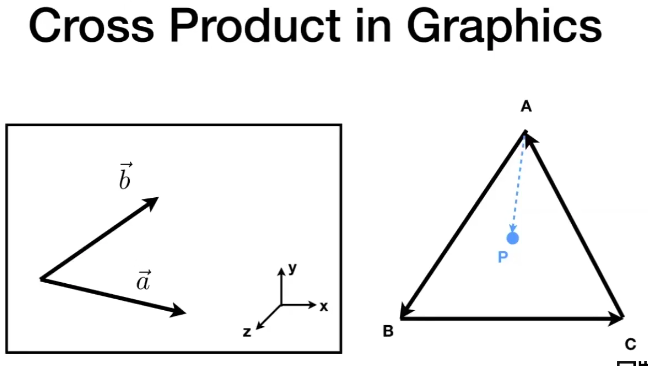
叉乘的意义 a、b向量形成的四边形的面积值
角度计算 1 2 3 4 5 6 7 8 9 10 11 Radian angleBetween (const Vector3& destconst { float len_product = length() * dest.length(); if (len_product < 1e-6 f) len_product = 1e-6 f; float f = dotProduct(dest) / len_product; f = Math::clamp(f, (float )-1.0 , (float )1.0 ); return Math::acos(f); }
万向锁问题 万向锁问题是在使用欧拉角进行旋转时会出现的一种现象,它会导致在某些方向上的旋转失效,因为这个方向会和另一个轴的旋转产生冲突。解决万向锁问题的方法通常有以下几种
使用四元数进行旋转:四元数可以避免万向锁问题,而且在插值和累积旋转方面更加高效和精确(相对于使用矩阵转换来说,会减少浮点数运算次数,矩阵旋转还会存在万向锁的问题)
使用轴角表示进行旋转:轴角表示也可以避免万向锁问题,其表示方式是使用一个轴向量和一个角度来表示旋转
使用角度限制:可以对旋转的角度进行限制,比如在某个轴向上旋转的角度不超过90度。这种方法可以避免万向锁问题,但是可能会产生其他问题,比如旋转不连续
避免连续旋转:避免在同一个轴向上进行连续旋转,可以使用其他轴进行旋转。如果需要在同一个轴向上进行连续旋转,可以使用微小的偏移量或者随机化来避免万向锁问题(Unity中对于摄像机旋转,就可以做如下处理,将摄像机置于一个空物体下,控制空物体的水平轴旋转带动摄像机旋转,垂直旋转时旋转摄像机自身)
得到旋转的四元数 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 Quaternion getRotationTo (const Vector3& dest, const Vector3& fallback_axis = Vector3::ZEROconst { Quaternion q; Vector3 v0 = *this ; Vector3 v1 = dest; v0.normalise(); v1.normalise(); float d = v0.dotProduct(v1); if (d >= 1.0f ) { return Quaternion::IDENTITY; } if (d < (1e-6 f - 1.0f )) { if (fallback_axis != Vector3::ZERO) { q.fromAngleAxis(Radian(Math_PI), fallback_axis); } else { Vector3 axis = Vector3::UNIT_X.crossProduct(*this ); if (axis.isZeroLength()) axis = Vector3::UNIT_Y.crossProduct(*this ); axis.normalise(); q.fromAngleAxis(Radian(Math_PI), axis); } } else { float s = Math::sqrt((1 + d) * 2 ); float invs = 1 / s; Vector3 c = v0.crossProduct(v1); q.x = c.x * invs; q.y = c.y * invs; q.z = c.z * invs; q.w = s * 0.5f ; q.normalise(); } return q; }
反射 推导
1 2 3 4 5 6 7 Vector3 reflect (const Vector3& normalconst { return Vector3(*this - (2 * this ->dotProduct(normal) * normal)); }
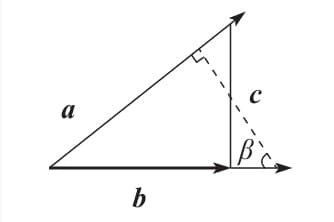
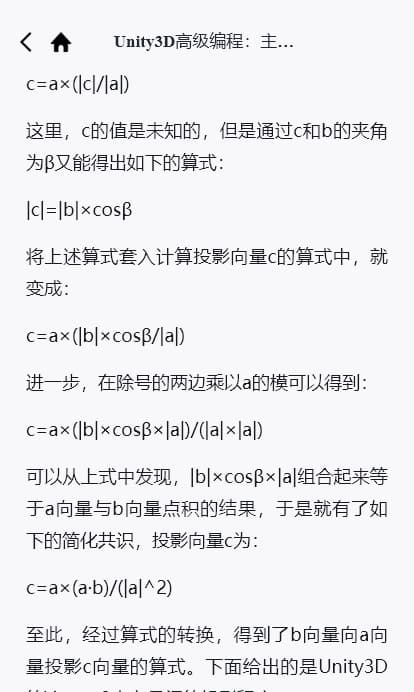
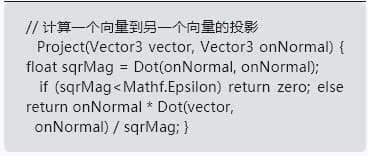
投影 1 2 3 Vector3 project (const Vector3& normalconst { return Vector3(*this - (this ->dotProduct(normal) * normal)); }
插值运算 1 2 3 4 5 6 7 8 static Vector3 lerp (const Vector3& lhs, const Vector3& rhs, float alpha return lhs + alpha * (rhs - lhs); } static Vector3 clamp (const Vector3& v, const Vector3& min, const Vector3& max{ return Vector3(Math::clamp(v.x, min.x, max.x), Math::clamp(v.y, min.y, max.y), Math::clamp(v.z, min.z, max.z)); }